南京全控航空科技有限公司是國內(nèi)領(lǐng)先的stewart并聯(lián)機器人及運動控制系統(tǒng)產(chǎn)品和整體解決方案的生產(chǎn)企業(yè)����。是集研發(fā)設(shè)計���、生...
2025-03-24

六自由度運動學(xué)分析和六自由度動力學(xué)分析是機器人學(xué)中兩個關(guān)鍵的概念�,它們分別涉及機器人的運動和力學(xué)行為����。
2024-01-16
六自由度平臺是一種機械系統(tǒng),可以在三個平面上自由運動���,并且可以繞三個軸旋轉(zhuǎn)����。
2023-12-26
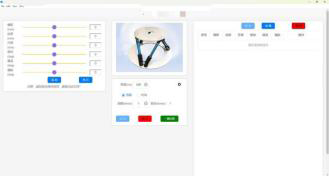
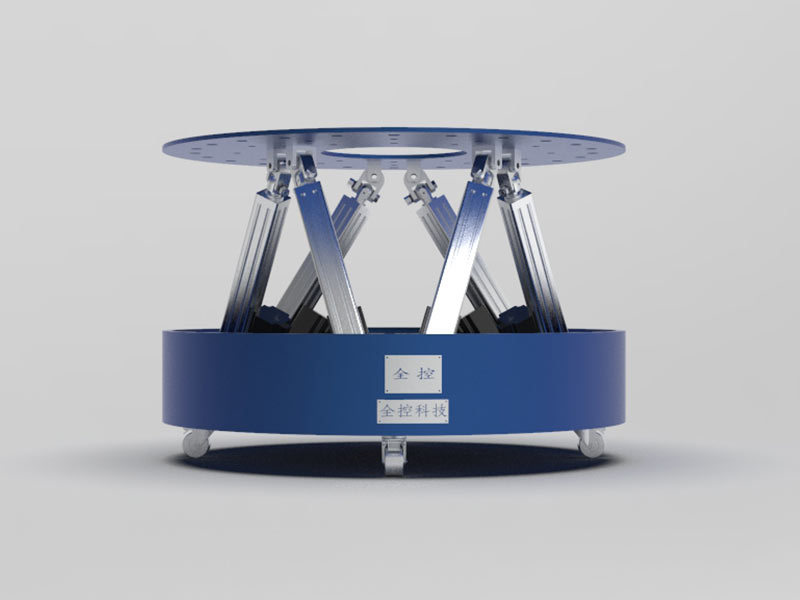
本文采用的Stewart并聯(lián)機器人平臺如圖1所示��,主要包含上平臺����、下平臺以及六個支桿。其中六個支桿的兩端采用上�����、下兩...
2023-12-20
Stewart六自由度并聯(lián)平臺的LocLab運動學(xué)及PowerLab動力學(xué)分析是后續(xù)結(jié)構(gòu)優(yōu)化及控制器設(shè)計的基礎(chǔ)�,因此...
2023-10-24
六自由度平臺視覺引導(dǎo)系統(tǒng)基于多目立體視覺技術(shù),采用多相機組合實現(xiàn)反光標(biāo)記點的檢測以及對接對象目標(biāo)位姿的檢測與輸出��,多目立...
2023-10-09
陀螺儀通過提供相關(guān)平臺角運動或旋轉(zhuǎn)的信息���,在六自由度運動平臺中發(fā)揮著至關(guān)重要的作用��。六自由度運動平臺是一種機械系統(tǒng)�����,可以...
2023-07-18
摘要: 隨著我國經(jīng)濟的發(fā)展�����,科研水平的提高����,人工智能技術(shù)和機器人已經(jīng)逐步進入我們的日常生活�,很多工業(yè)領(lǐng)域已經(jīng)開始投入使用...
2023-01-04
工業(yè)機器人從機構(gòu)學(xué)的角度可以分為串聯(lián)機器人和并聯(lián)機器人兩大類。串聯(lián)機器人以開環(huán)機構(gòu)為機器人機構(gòu)原型;并聯(lián)機器人為有一個或...
2022-11-22
六自由度運動平臺是由六個伺服電機帶動電動缸做伸縮變化運動���,六個電動缸并聯(lián)設(shè)置共同驅(qū)動運動平臺�。運動平臺的每個電動缸都能夠...
2022-05-09
 400 025 3599
400 025 3599










 在線咨詢
在線咨詢 



